一、实验室概况
机器人与智能控制实验室主要面向机器人工程、自动化、智能装备与系统等专业开放。实验室主要承担工业机器人、服务机器人运动原理的研究及机器人各功能二次开发的相关实验和实训。同时为毕业设计、科研项目提供实验平台。该实验室为学生提供了学习和研究机器人技术的平台,学生不仅可以提高对工业机器人和服务机器人的控制方法的理解,还能培养机械结构设计和运动控制的实践能力。
二、开设实验项目
序号 | 实验项目名称 |
1 | 坐标变换 |
2 | 构建机器人对象 |
3 | 机器人运动学求解 |
4 | 轨迹规划 |
5 | ROS及Ubuntu系统 |
6 | ROS开发基础 |
7 | ROS中的仿真工具 |
8 | 机器人抓取操作仿真 |
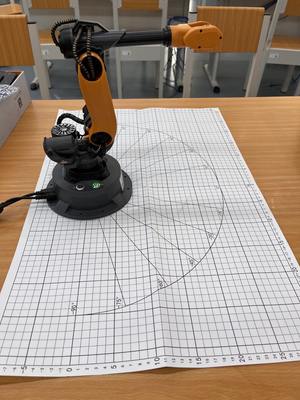
9 | 机械臂写字系统设计 |
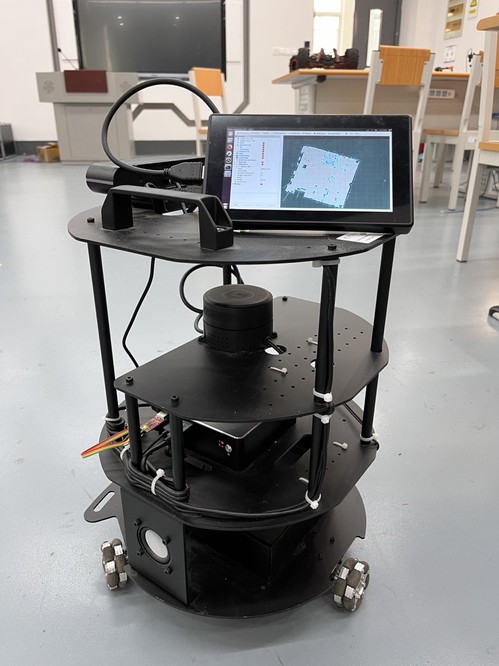
10 | 智能小车控制设计 |